
Inverter-based technology is fast becoming the dominant type of technology in many smaller island power systems and in pockets of very large power systems. Today, inverter-based resources (IBRs) comprise the majority of most interconnection queues for new resources, a trend that shows little sign of reversing. This trend is raising critical questions about the capability of the current generation of inverters, which have been designed to operate on an existing grid that is generally dominated by synchronous machines, and are termed grid-following inverters. While industry is racing to develop the next generation of inverters, termed grid-forming, the debate is not yet settled on what “grid-forming” really is or what it will mean for the future growth of renewable generation.

There are known challenges and limitations to today’s grid-following IBR technology, just as with any technology. The major limitations of today’s inverters are gaining widespread discussion in the industry—that they require a sufficiently strong grid in order to operate, and that they don’t provide inertia or short-circuit current. Like inverters, synchronous machines have limitations, too. However, the industry has over 100 years of experience working around the limitations of synchronous machines (like rotor angle stability) and turning potentially undesirable behaviors of synchronous machines (like high fault currents) into useful and desirable qualities (that enable detection of faults, for instance).
The inverter technology is different from the existing, familiar technology, and through the lens of the conventional synchronous machines, the differences can appear to be disadvantages. It makes me think of when music CDs were first coming out in the late 1980s. Unlike cassette tapes, you couldn’t record on CDs. They were easily scratched. They skipped if you bumped them. All minor disadvantages that could mask the superior audio quality (okay audiophiles, let’s save the analog v. digital discussion for later!).
Today’s IBRs behave differently from synchronous machines in a few important respects for grid stability. For instance, they do not exhibit high fault currents, and they do not respond with inertia the way synchronous machines do. Deepak Ramasubramanian expands on this topic in his blog post, “On the Road to Grid-Forming Inverters: When and How Many Will We Need?” Like early CD players, the differences in this new technology may initially appear as disadvantages. One response to the technological shift is to ask, how can IBRs be made to behave like synchronous machines? But I challenge the industry to ask, how can IBRs be made better than synchronous machines?
The Fundamental Challenges
The behavior of synchronous machines and today’s grid-following inverters is complex and is highly time-dependent. To better understand the differences between the technologies and identify relative advantages and disadvantages, consider their response following a grid disturbance in two separate time periods, which I refer to unimaginatively here as the very short timeframe and the longer timeframe. As a simple (and arbitrary) point of reference, “very short” is considered to be less than 0.1 seconds and “longer” is considered to be greater than 0.1 seconds.
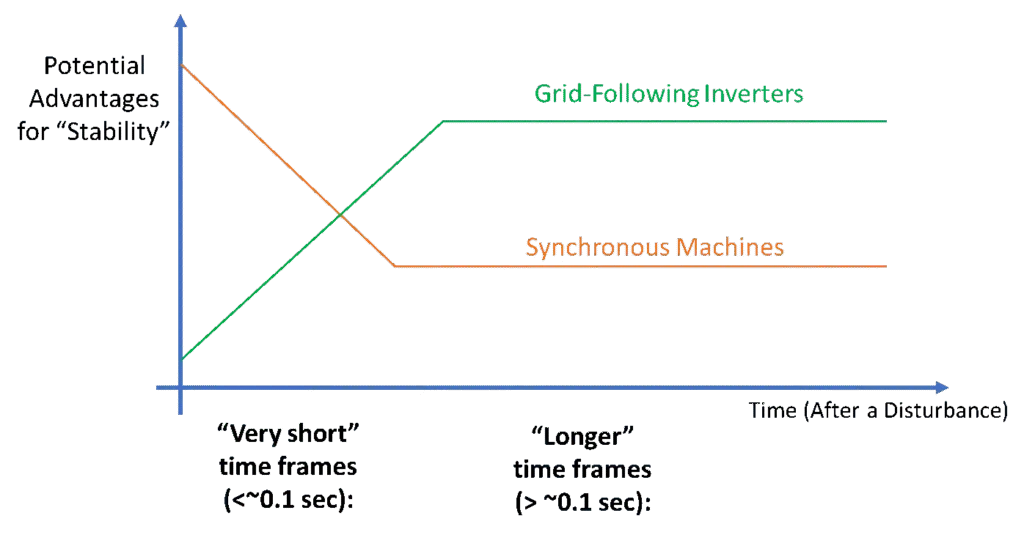
In the very short timeframe, synchronous machines behave like an anchor for the grid as the machine’s internal voltage magnitude and angle deviate very little from pre-disturbance conditions (due to the magnetic flux of the machine’s core and the inertia of the spinning rotor, neither of which can change instantly). This response does not require any measurement feedback—it is inherent and immediate, which helps make synchronous machines stable in very short timeframes. Conversely, grid-following inverters are challenged in the very short timeframe because their internal regulators rely on measurements of voltage and current to maintain control, both of which can be changing dramatically in this timeframe. Tuning these internal regulators to be very fast typically compromises the regulator’s stability, meaning that there is a practical limit to how quickly and accurately grid-following inverters can respond in the very short timeframe. For most grid applications, the capability of grid-following inverters has been ample—well in excess of the demands of most applications. But we can envision a highly inverter-based future where this will not be true.
In the longer timeframe, synchronous machines have more significant rotor angle deviations, which can result in first-swing instability or small-signal instability. While there are mitigation options to help, these challenges are the reason for the reduced stability of synchronous machines in this longer time frame. Conversely, grid-forming inverters can be controlled to be very stable in the longer timeframe with resilient synchronization algorithms and damping controllers, which can out-perform synchronous machines.
“Grid-forming” is best considered an adjective describing inverters with special characteristics rather than referring to a specific technology, as elaborated by Nicholas Miller in his article “10 Things You Should Know About Grid-Forming Inverters.” Grid-forming inverter behavior has the potential to borrow the best from both worlds, keeping the longer-timeframe attributes of grid-following behavior with its resilience and robustness to rotor angle instability, and augmenting it with synchronous machine–like behavior in very short timeframes.
Looking Forward
With music CDs, the overwriting capability of cassette tapes was brought forward to CDs, as was the improved robustness of playback. But CDs left behind the early wear-out from overplaying your favorite tape on a hot day and the ability for small children to pull out the ribbon to use as tinsel around the house. Similarly, as inverter technology evolves from grid-following to grid-forming, the power systems industry will gain the most when inverter designers borrow some concepts from synchronous machines and leave others behind.
Inverter control flexibility offers tremendous potential, especially when backed by MWs and GWs of hardware. With this comes tremendous responsibility to ensure the controls behave as intended for the vast operating range that we expect from the power system and that they are represented appropriately in the models. There is plenty to do for all of us in the years ahead!
Matt Richwine, Co-founder
Telos Energy