
Rising levels of inverter-based resources and the accompanying retirement of the synchronous machine fleet is changing the dynamics of how the system achieves/ensures stability. However, the shift is not toward a network made up solely of inverter-based resources. Synchronous machines will remain present into the future and include the synchronous generators of today (at least for a period of time) as well as synchronous machines associated with renewable sources of energy. Not all renewable sources of energy are inverter-interfaced, and renewable energy sources such as hydro and biogas can continue to use synchronous machines. Further, many jurisdictions have installed, or are planning to install, synchronous condensers to increase the strength of the network. Inverter-based resources can contribute to system stability through delivery of services such as fast frequency response and grid forming behavior, and certain inverter control schemes even aim to mimic the characteristics of synchronous machines, but with increased flexibility and efficiency, we may still face a concern regarding seamless synchronization of multiple resources that operate with control systems of different time scales. In this paradigm, a question arises as to whether or not all these sources can co-exist in the same network. Further, can the remaining synchronous machines continue to maintain stability during operation?
 Effects of Low Synchronizing Torque on a Network of Synchronous Generators
Effects of Low Synchronizing Torque on a Network of Synchronous Generators
Synchronous machines across a large power network remain synchronized to each other through electromagnetic forces. However, if synchronizing torque is low and a disturbance occurs, synchronous machines experience first swing instability, losing their lock with the network and essentially “running away.”
Reduction in synchronizing torque is primarily due to two reasons: a larger angle spread, and long transmission lines with a large impedance. In a conventional synchronous machine system, the angle spread across the lines helps determine the magnitude of synchronizing torque that can be generated. The larger the angle spread, the lower the amount of synchronizing torque (synchronizing torque varies in proportion to the cosine of the angle difference). Such reductions in synchronizing torque also occur with some renewable energy sources, notably, those that make use of synchronous machines, such as hydro power plants. They are typically located far from load centers (similar to the location of many inverter-based resources) and are interconnected to the transmission system through long transmission lines, which also usually (unless compensated) have a large impedance (primarily reactance). This can further reduce the synchronizing torque, as synchronizing torque varies inversely with the value of reactance.
A reduction in synchronizing torque can also occur when a synchronous generator increases export of active power. Upon the export of active power, its internal rotor angle increases, and if voltage magnitude is controlled on both ends of a long line, then an increase in power export would increase the angle spread across the line. This increase in angle spread, along with a large transmission reactance, can lead to first swing instability from machines, after a disturbance, as the synchronizing torque can be low. Synchronizing torque is a fundamental electromagnetic property; when this torque is low, and subsequently a disturbance occurs, since the amount of magnetic coupling force is reduced, machines can lose their lock with the network. The occurrence of this first manifests as a pole slip within the machine. When a pole slip occurs in a machine, the large mechanical rotors of the machine accumulate potential and kinetic energy throughout the one cycle of rotation. Tremendous torque and mechanical forces can then be generated when it attempts to lock onto the network after this one cycle, causing severe mechanical stresses within the generator. The maintenance of high synchronizing torque allows synchronous machines to remain synchronized to each other.
Impact of Increase in Inverters in a Network on Power Transfer and Synchronizing Torque
When rotating machines in one portion of the network are replaced with inverter-based resources, changes occur in the system properties. First, the inherent and natural electromagnetic link is broken as inverter-based resources (such as batteries, solar photovoltaics (PV), and Type III and Type IV wind turbines) are only electrically coupled to the network. The network-facing element – the inverter – has no magnetic properties of its own and is instead purely driven by its control system. Essentially, conventional inverters synchronize and lock onto the network using a control system, called phase lock loop, that tracks the angular position of the network, and the inverter aims to inject constant current into the grid. These inverter control schemes are denoted as grid-following methods. Second, inverter-based resources are inherently static in behavior and do not naturally possess rotational inertia. This is largely true even for Type III and Type IV wind turbines. The turbine blades do possess quite a bit of inertia, but the entire turbine generator set is interfaced to the network through an inverter which essentially decouples it from the network.
Both of these properties of inverters – the break in the electromagnetic link between source and network, and the static nature of the inverter source – help the system to operate at larger voltage angle differences with a mix of inverters and synchronous machines, because there is no inherent concept of first swing instability and synchronizing torque in an inverter itself. When operating with a larger angle spread (i.e., pushing more power over lines with large impedance), even if a disturbance occurs, inverter-based resources can continue to remain locked to the network, as long as their control systems that perform this synchronizing task are robust and designed well (more on this below). Additionally, even if a synchronizing slip of one cycle occurs in the control system (think of it as the control system latching onto the network in the second attempt after one full rotation i.e., one cycle), there is minimal electrical torque generated when the inverter subsequently latches on as its mechanical inertia is zero, in contrast to the severe mechanical stresses that occur in a synchronous generator.
As a result, the operation of an inverter-based resource can be more stable with a larger angle spread than that of a synchronous machine. Consider a simple example such as a two-machine system shown in Figure 1. In one scenario, the sending source is a 200 MVA synchronous machine with governor and excitation system (the orange lines), while in another scenario, the sending source is a 200 MVA inverter-based resource (the blue lines), with a robust and well-designed control system. Although the plots do not explicitly show first swing instability with synchronous machines, they show the ability of an inverter-based resource to operate with a more stable behavior than synchronous machines when pushing power over long lines.
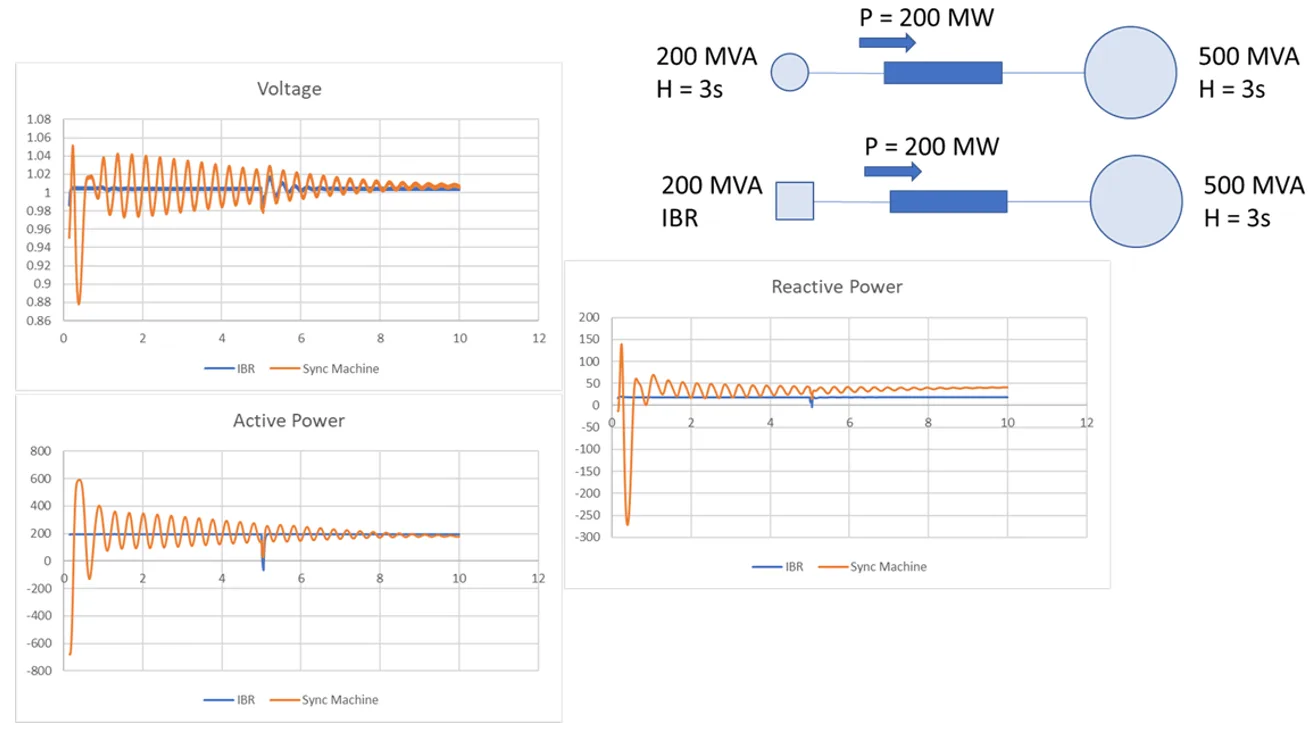
Figure 1: Improvement in stability in transfer of power from an IBR as compared to a synchronous machine to equal rating and dispatch [Source: Electric Power Research Institute]
But, as mentioned above, this behavior of an inverter-based resource is dependent on its control system being robust and well designed. Most conventional grid-following inverter-based resources make use of the network’s three phase sinusoidal voltage waveform as an input to determine its angular position for the purpose of locking onto it. With long transmission lines, this voltage waveform at the sending end of the line (the end where the inverter-based resource is connected) can be increasingly sensitive to the current being injected. Essentially, the voltage waveform will jump around more, signifying a weak grid (or low short circuit grid). If not designed well, the control system of an inverter-based device can also have difficulties remaining synchronized to the network and can oscillate. Here, the challenge is that this behavior is very much dependent on how the control system of the inverter is designed, and it also depends on the level of voltage support from the grid side.
Stability with a Variety of Inverter Control Schemes
Regarding inverter control schemes, there are many ways to skin the cat. A key question becomes can multiple varieties of inverter control schemes co-exist with and without synchronous machines? Yes, if designed well. With the emergence of newer grid forming control concepts (which don’t aim to inject constant current into the grid but instead strictly regulate voltage magnitude and frequency), one shouldn’t forget that even these control methods have to be designed and tuned well in order to provide a robust and stable dynamic behavior. For example, a poorly tuned virtual synchronous machine-based inverter control method can just as easily result in instability as an actual synchronous machine resource. However, if inverter controllers are well tuned, then it is possible to obtain seamless synchronization in a network composed of high numbers of inverter-based resources as well as few remaining synchronous generators and/or synchronous condensers.
For example, consider a test system shown in Figure 2 with 17 inverter-based resources and one synchronous condenser. Of the 17 inverter-based resources, five are conventional grid-following resources and 12 are grid-forming resources with three different control methods.
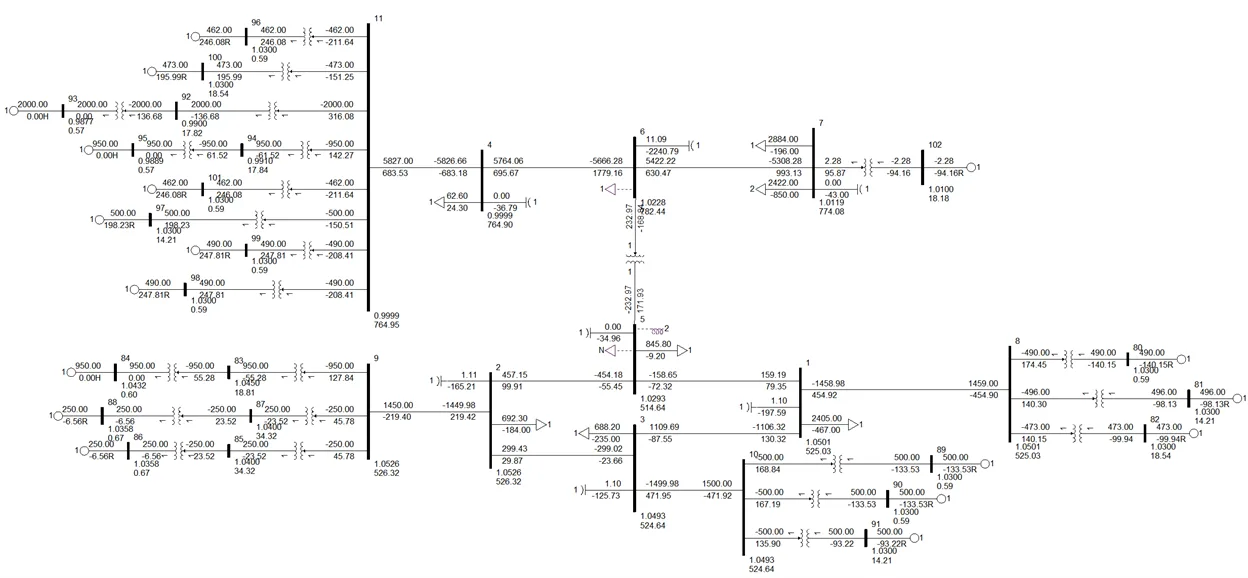
Figure 2: Layout of test system consisting of four clusters of inverter-based resources with a total of 17 inverter-based generation units with different control methods, and one synchronous condenser [Source: Electric Power Research Institute]
Figure 3 shows the dynamic response of the system to switching of a reactor, compared across both electromagnetic transient domain and positive sequence domain. It is seen that even though the system consists of a variety of control methods and resource types, with a majority of inverter-based resources along with synchronous machine devices, a stable response is obtainable.
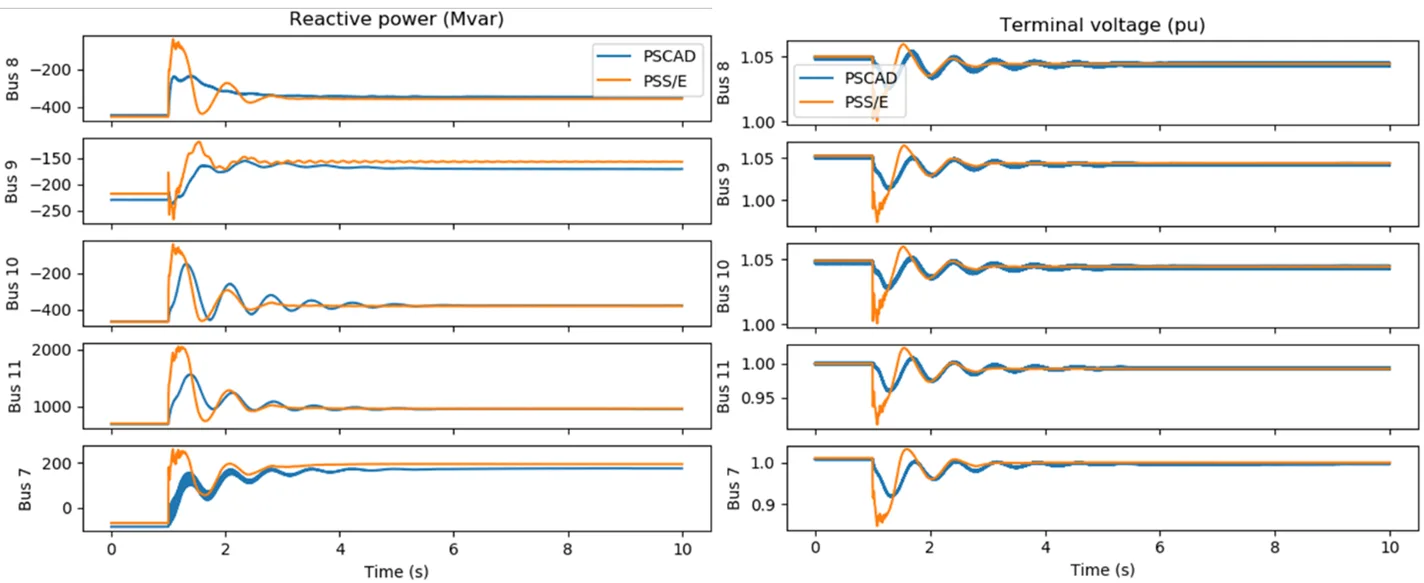
Figure 3: Simulated response of the test system compared across two simulation domains for the switching in of a reactor [Source: Electric Power Research Institute]
Future Needs Including an Increased Focus on Tuning, Stability, and Coordination
The behavior of an inverter-based resource is dependent on its control system design and robustness. With an increase in such resources, planning and operation of the future power system network can require multiple stability analyses as the network characteristics change. The retirement of synchronous machines can require retuning of power system stabilizer controls in the remaining synchronous machines, and this can be beneficial in bringing about an efficient system operation. However, existing interconnection procedures and policies can be an obstacle, as the burden of maintaining stability can fall on the new incoming resources. This is a topic that will require further attention in the future.
Further, with many proprietary inverter-based controls, it will be critical to have coordination among inverter equipment manufacturers, system planners, and simulation/analytical tool developers. Without access to the full inverter control model, black-box small signal model identification techniques would have to be leveraged to carry out stability analysis of the system. Ongoing research around the world has started to address this topic, with much remaining to be done.
Deepak Ramasubramanian
Technical Leader, EPRI