
The Western Electricity Coordinating Council (WECC) generic models were designed for large transmission planning studies that involve a large network, and a large set of generators, loads and other dynamic components. The objective is to assess dynamic performance of the system, particularly recovery dynamics following grid-side disturbances such as transmission-level faults. In this context, WECC uses positive-sequence power flow and dynamic models that provide a good representation of recovery dynamics using integration time steps in the range of 1 to 5 milliseconds. This approach does not allow for detailed representation of very fast controls and response to imbalanced disturbances. It should be noted that these positive-sequence generic dynamic models for inverter-based generators tend to produce a short-duration (a cycle or shorter) voltage spike at fault clearing. These spikes should be ignored in most cases, as they do not representative the performance of actual hardware. In reality such momentary spikes are far smaller in magnitude and duration for the actual equipment due to the very fast converter controls. They are simply a consequence of the model’s limited bandwidth, integration time step, and the way the current injection models interface with the network solution.
The WECC generic models are intended to address NERC and WECC modeling requirements. As the generic models continue to be refined over time, they will eventually be used for generator interconnection studies as well, consistent with power system industry practice. At the discretion of the Transmission Planner, manufacturer-specific models may be used in the context of interconnection studies; however, such practice has a number of technical and process drawbacks.
Contents
- 1 Power Flow Representation
- 2 Implications of Collector System Equivalencing
- 3 Volt/Var Control
- 4 Active and Reactive Power Control
- 5 Fault Ride-Through and Representation of Protection Limits
- 6 Model Parameters
- 7 References
Power Flow Representation
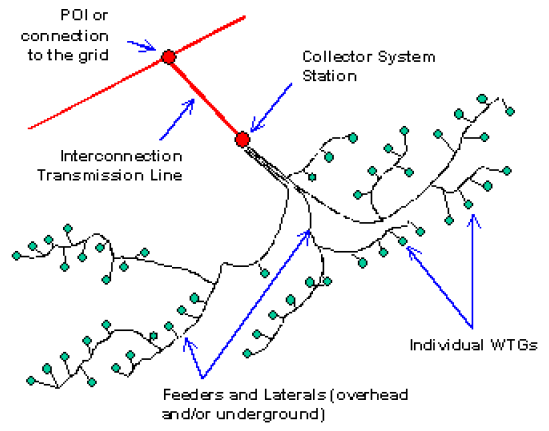
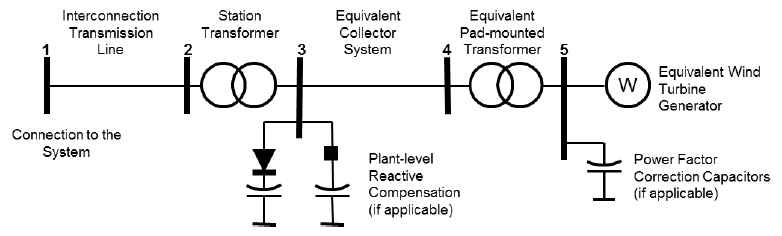
The WECC generic dynamic models described in this guideline assume that the wind power plant is represented explicitly as a generator in power flow. For bulk system studies, it is impractical and unnecessary to model the collector system network inside the plant to the level of detail. In accordance with the WPP Power Flow Modeling Guide, wind power plants must be represented by a simplified system consisting of one or more equivalent generators and unit transformers, equivalent collector system, substation transformer, and plant-level reactive support system, if present. For most wind power plants, a single-generator equivalent model is adequate for bulk-level power flow and dynamic simulations. The WPP Power Flow Modeling Guide also describes a methodology to derive the parameters for the single-machine representation, including a way to derive the collector system equivalent from design data.
Implications of Collector System Equivalencing
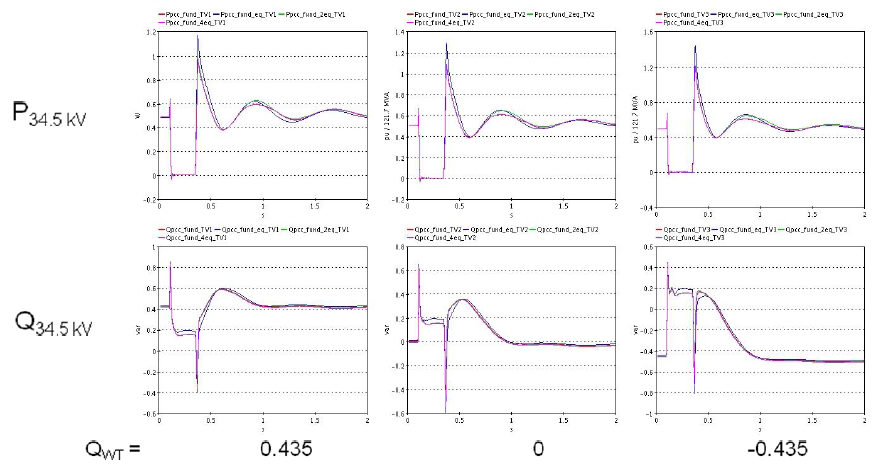
It is important that the equivalent impedance of the collector system be represented in dynamic simulations because the inverter’s dynamic response is affected by the terminal voltage. Since wind power plants extend over a large geographical area, the electrical impedance between the terminals of each WTG and the point of interconnection could be significantly different, leading to a diverse dynamic response. It is not possible to capture this level of detail with a single-machine equivalent. Therefore, it should be understood that the modeling approach provides an indication of the average response of the WTGs, as opposed to the response of any particular WTG in the wind power plant. It has been shown that the practical net effect of this electrical diversity is relatively small, as long as the equivalent collector system impedance is represented. Figure on the right compares simulated responses to a 3-phase fault, as measured at the collector system station, obtained with a single machine equivalent and with a multiple-machine equivalent.[3] In this example, a different wind speed was assumed for a portion of the WPP.
When the difference in connection impedance for a group of WTGs in the WPP is considerably different, or when different types of WTGs are present in the WPP, it may be prudent to represent the plant with a two- (or more) machine equivalent circuit.[4]
Volt/Var Control
Reactive power capability and response characteristics are an important consideration in system studies. A variety of reactive power control modes can be implemented in a wind power plant. Wind power plants typically control voltage at the point of interconnection. During a dynamic event, the reactive power response is the net result of fast inverter response and slower supervisory control by the plant controller, and the contribution of supplemental reactive devices.
Type 1 and Type 2 WTGs operate at unity power factor, assisted by power factor correction capacitors. It is recommended that power factor correction capacitors be modeled explicitly at the generator terminal bus. Reactive control at the point of connection is achieved with additional plant-level reactive support equipment such as STATCOMs or SVCs. More recently, some Type 1 WTG vendors do supply their turbine with thyristor switched shunt capacitors at the generator terminals, in these cases the shunt compensation at the generator terminals should really be modeled using an SVC model, such as the WECC SVSMO2 model.[5] Type 3 and Type 4 WTGs can participate in plant-level reactive control with the assistance of a plant controller that adjusts the WTG power factor reference. Faster-acting local controls implemented in the WTG converters can provide additional dynamic response to voltage dips, while avoiding converter current and terminal voltage limits. STATCOMs and SVCs may be used even in Type 3 and Type 4 wind power plants to meet connection reactive control and voltage ride-through requirements. This is especially true in weak interconnections.
Active and Reactive Power Control
Wind power plants have limited ability to control active power. Under normal conditions, the goal is to capture as much energy from the wind as the equipment can handle. The WECC generic models assume a fixed reference power level corresponding to the generator output in solved power flow case. Presently, there is no provision for incorporating simulation of wind variability in large-scale system studies. This approach is prudent given that the effect of AGC is not included in dynamic simulations. The generic models do allow for the specification of active power control, including ramp rate limits, frequency response and active/reactive power priority during voltage dips. Similarly, WPPs are capable of reducing power output during high frequency events by turning off some WTGs, or by allowing the WTGs to temporarily operate below their optimal level. A positive frequency droop is also possible, but this entails a higher energy penalty since “spilling” wind over a long period of time would be required. For this reason, only output reduction during high frequency is typically considered.
Type 3 and Type 4 WTGs do not inherently have inertial response because these machines are controlled by the power electronic converters that effectively isolate the generator from the grid. However, some manufacturers offer a “synthetic inertia” feature, which is achieved by temporarily drawing energy out of the rotating turbine-generator shaft and thus allowing the machine to slow down or speed up as a function of grid frequency. The versions of WECC generic models discussed in this document do not include provisions to represent synthetic inertia capability.
Fault Ride-Through and Representation of Protection Limits
Various types of controls are used to keep the WTG from tripping within the voltage ride-through envelope. For example, Type 3 and Type 4 WTGs might use a dc-chopper circuit or an ac active-crowbar mechanism to protect against DC link over-voltage, which can occur during sever faults on the grid side. WTGs also pitch the blades in an effort to improve stability during fault recovery. This is particularly important for Type 1 and Type 2 WTGs. The new WECC generic models were specifically modified to have higher fidelity during fault conditions. However, it is not possible to capture the complex behavior of actual hardware using positive-sequence models. This limitation is acceptable because system studies focus on the characteristics of the dynamic recovery, rather than on system conditions during the fault. Considering that terminal voltage can vary significantly across the plant, a single machine representation has obvious limitations with respect to assessment of voltage ride through[6].
Model Parameters
As with any other equipment, appropriate parameters must be selected to represent the dynamic behavior of the corresponding wind power plant. Default parameters provided are intended only for model testing, and do not represent any particular project. Consistent with established WECC practice, input from the plant operator and equipment manufacturer is required to correctly parametrize the model (periodic model validation is also required). This is also true for the power flow representation.
References
- ↑ WECC REMTF, WECC Wind Power Plant Dynamic Modeling Guide, November 2010, [Online]. Available: http://renew-ne.org/wp-content/uploads/2012/05/WECCWindPlantDynamicModelingGuide.pdf. [Accessed June 2015].
- ↑ WECC REMTF, WECC Wind Power Plant Dynamic Modeling Guide, April 2014, [Online]. Available: https://www.wecc.biz/Reliability/WECC%20Wind%20Plant%20Dynamic%20Modeling%20Guidelines.pdf. [Accessed June 2015].
- ↑ J. Brochu, R. Gagnon, C. Larose, “Validation of the WECC Single-Machine Equivalent Power Plant”, Presented at the IEEE PSCE DPWPG-WG Meeting, Seattle, Washington, March 2009
- ↑ E. Muljadi, S. Pasupulati, A. Ellis, D. Kosterev, “Method of Equivalencing for a Large Wind Power Plant with Multiple Turbine Representation”, presented at the IEEE Power Engineering Society, General Meeting, Pittsburgh, PA, July 20-24, 2008, http://www.nrel.gov/docs/fy08osti/42886.pdf
- ↑ Generic Static Var System Models for the Western Electricity Coordinating Council, April 18, 2011 (https://www.wecc.biz/Reliability/WECC%20Static%20Var%20System%20Modeling%20Aug%202011.pdf)
- ↑ See section 5 of the report WECC Type 3 Wind Turbine Generator Model –Phase II, January 23, 2014 for a more detailed discussion of some of these issues, such as the active-crowbar mechanism. (http://www.powerworld.com/files/WECC-Type-3-Wind-Turbine-Generator-Model-Phase-II-012314.pdf).[Accessed June 2014].