
Author: WECC REMTF[1]
The Western Electricity Coordinating Council (WECC) generic models are reduced-order, positive-sequence models suitable for transmission planning studies involving a large network, and thousands of generators, loads and other dynamic components. These models are based on REMTF technical specifications approved by WECC. The models are available as standard-library models in commercial simulation platforms used in WECC. The purpose of this article is to help model users understand the limitations of the models, the model structure, user-selectable options, requirements for scaling the plant size, and representation of protection settings.
The wind power plant generic models described in this article are intended for general bulk system planning studies. The general guidelines discussed in this document should be used in conjunction with the model documentation provided as part of the relevant simulation platform. Selection of appropriate model parameters requires consultation with inverter manufacturer and plant operator. Wind power plant dynamic modeling is an area of active research. As with any other model, the WECC generic wind power plant models will evolve based on industry experience and technology evolution.
Contents
Technical Specifications for the WECC Generic Models
The WECC generic models for wind power plants are based on the following technical specifications:
- The models shall be non-proprietary and accessible to transmission planners and grid operators without the need for non-disclosure agreements.
- The models are expected to provide a reasonably good representation of dynamic electrical performance of wind power plant at the point of interconnection with the utility grid, and not inside the wind power plant collector system.
- Studies of interest to be performed using the generic models are electrical disturbances, not wind disturbances. Electrical disturbances of interest are primarily balanced transmission grid faults, not internal to the wind power plant, typically of 3 – 6 cycles duration. Other transient events such as capacitor switching and loss of generation can also be simulated.
- The accuracy of generic models during unbalanced events needs further research and development. At the present time, there is no standard guideline.
- Manufacturers and model users (with guidance from the manufacturers) shall have the ability to represent differences among generators with the same topology by selecting appropriate model parameters.
- Simulations performed using these models typically cover a 20-30 second time frame, with a ¼ cycle integration time step. Wind speed is assumed to be constant during this period.
- The generic models shall be functional models suitable for the analysis and simulation of large-scale power systems. Their frequency range of validity is from dc to approximately 10 Hz.
- A generic model shall include the means for external modules to be connected to the model, e.g., protection functions.
- The models shall be initialized based on the power-flow power dispatch. For power less than rated, blade pitch will be set at minimum and wind speed at an appropriate (constant) value. For rated power, a user-specified wind speed (greater than or equal to rated speed) will be held constant and used to determine initial conditions.
- For type 2 WTG, a look-up table of power versus slip shall be provided.
- For converter-based WTG ( Type 3 and Type 4) appropriate limits for the converter power and current shall be modeled.
- Power level of interest shall be primarily 100% of rated power, with wind speed in the range of 100% to 130% of rated wind speed. However, performance should be correct, within a reasonable tolerance, for the variables of interest (current, active power, reactive power and power factor), within a range of 25% to 100% of rated power.
- In addition to the overall machine inertia, the first shaft torsional mode characteristics shall be user-specified in terms of frequency, turbine inertia, and damping factor, with calculations performed internally to determine appropriate torsional model parameters to match the modal frequency. The model should be able to represent one or two masses.
- The models shall be applicable to strong and weak systems with a short circuit ratio of 3 and higher at the point of interconnection. The models should not behave erratically when the SCR is low. However, it should be noted that these generic models are NOT intended for studying parts of the system that are subject to very low short-circuit levels. In such cases, detailed vendor specific models may be needed.
- Aerodynamic characteristics shall be represented with an approximate performance model that can simulate blade pitching, assuming constant wind speed, without the need for traditional CP curves.
- Shunt capacitors and any other reactive support equipment shall be modeled separately with existing standard models.
- The models shall have provision to detect voltage dip conditions and switch to alternative control modes as necessary.
WECC approved the use of four generic dynamic models for wind power plants. A detailed model specification document is available on the WECC website.[2] A brief description is given below of these models for completeness. Where discrepancies may inadvertently exist between the descriptions given below and the detailed model specification document, precedence should be given to the specification document.
Generic Model Block Diagrams
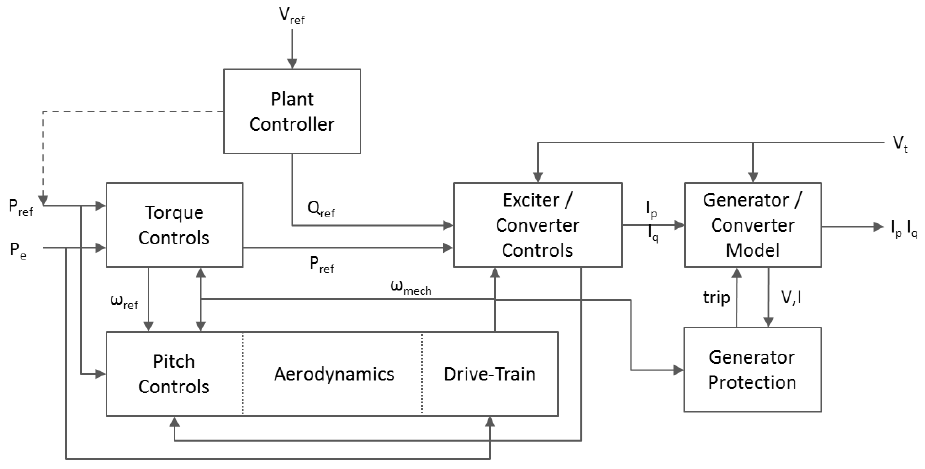
In the Type 1 and Type 2 generic models, the generator is represented as a conventional “one-cage” or “two-cage” induction generator model. For Type 3and Type 4, the generator-converter combination is represented by a very simple model neglecting essentially all machine flux dynamics. The power converter/excitation block represents external rotor resistance control in the Type 2 WTGs, or active/reactive controls in Type 3 and Type 4 WTGs. The pitch control and aerodynamics block represents the aerodynamic-to-mechanical power conversion and rotor speed controls. The mechanical drive train block represents the mechanical link between the generator and the turbines i.e. shaft stiffness, gearbox, etc. Finally, an optional protection model can be added to simulate generator tripping based on voltage or speed.
For wind power plants based on Type 1 and Type 2 WTG, the required modules are listed below. Updates with respect to the first-generation of WECC generic models are noted.
- WT1G and WT2G modules, used to represent the generator in Type 1 and Type 2 WTGs, respectively. A standard induction machine model is used.
- WT1T and WT2T modules, used to represent the turbine in Type 1 and Type 2 WTGs, respectively.
- WT1P_B module, used to represent the aerodynamic (pitch) controls for Type 1 and Type 2 WTGs. This module was modified to more accurately reflect pitch control action during and shortly after a fault.
- WT2E module, used to represent the rotor resistance control for Type 2 WTGs.
Strictly speaking, only the WT1G/ WT2G module is required to run a simulation; however, the rest of the modules are needed to enable control functionality.
For wind power plants based on Type 3 and Type 4 WTGs, the required modules are listed below. The second-generation model specifications are significantly improved with respect to the previous WECC generic model, in terms of structure and functionality.
- REGC_A module, used to represent the generator/converter. It processes the real and reactive current commands, and outputs real and reactive current injection into the grid model.
- REEC_A module, used to represent the WTG electrical controls. It acts on the active and reactive power reference from the REPC_A module, with feedback of terminal voltage and generator power output, and provides real and reactive current commands to the REGC_A module.
- REPC_A modules, used to represent the plant controller. It processes voltage and reactive power output to emulate volt/var control at the plant level. It also processes frequency and active power output to emulate active power control. This module provides active reactive power command to the REEC_A module.
- WTGT_A module, used to represent the turbine.
- WTGAR_A module, used to represent the aerodynamic conversion ( Type 3 only).
- WTGPT_A module, used to represent the pitch controller ( Type 3 only).
- WTGTRQ_A module, used to represent the torque controller ( Type 3 only).
Strictly speaking, only the REGC_A module is required to run a simulation; however, the rest of the modules are needed to enable control functionality.
Standard generator protection models can be used to indicate the conditions that could lead to generator tripping. A list of available simulation modules for Siemens PTI PSS®E, GE PSLF™, and PowerWorld Simulator is shown below. Although there may be differences in the program implementation the models are functionally equivalent and have the same set of parameters. Also, testing was done to compare results among three software platforms (Siemens PTI PSS®E, GE PSLF™ and PowerWorld Simulator) to ensure agreement in simulations results across various software platform implementations based on the WECC model specifications.
| Type 1 | Type 2 | |||||
|---|---|---|---|---|---|---|
| Software Platform | PSLF™ | PSS®E | (PW) | PSLF™ | PSS®E | (PW) |
| Generator | wt1g | WT1G1 | wt1g, WT1G1 | wt2g | WT2G1 | wt2g, WT2G1 |
| Excitation | wt2e | WT2E1 | wt2e, WT2E1 | |||
| Turbine | wt1t | WT12T1 | wt1t, WT12T1 | wt2t | WT12T1 | wt2t, WT12T1 |
| Pitch Controller | wt1p | WT12A1 | wt1p, WT12A1 | wt2p | WT12A1 | wt2p, WT12A1 |
| Type 3 | Type 4 | |||||
|---|---|---|---|---|---|---|
| Software Platform | PSLF™ | PSS®E | (PW) | PSLF™ | PSS®E | (PW) |
| Plant Controller | repc_a | REPCAU1 | repc_a | repc_a | REPCAU1 | repc_a |
| Generator/Converter | regc_a | REGCAU1 | regc_a | regc_a | REGCAU1 | regc_a |
| Electrical Control | reec_a | REECAU1 | reec_a | reec_a | REECAU1 | reec_a |
| Turbine | wtgt_a | WTDTAU1 | wtgt_a | wtgt_a | WTDTAU1 | wtgt_a |
| Aerodynamics | wtga_a | WTARAU1 | wtgar_a | |||
| Pitch Controller | wtgp_a | WTPTAU1 | wtgpt_a | |||
| Torque Controller | wtgq_a | WTTQAU1 | wtgtrq_a | |||
| PSLF™ | PSS®E | PowerWorld | |
|---|---|---|---|
| Voltage / Frequency Protection | lhrvt / lhfrt | vtgtpa / frqtpa | lhrvt / lhfrt |
Model Call
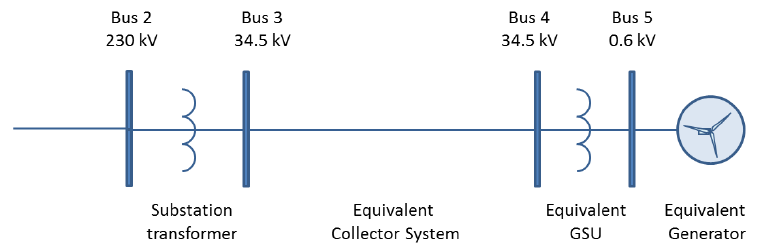
The model call varies according to the software platform. Users must follow the instructions provided with the model documentation, including rules for module call sequence and level of reporting. The examples below are PSLF™ model calls for a wind power plant represented by the equivalent circuit. It is assumed that the wind power plant capacity is 100 MW. The two examples correspond to wind power plants with Type 1 and for a Type 4 WTGs, respectively. The parameters shown are intended for model testing only, and do not represent the performance of any particular wind power plant or equipment. The following assumptions apply to the model call examples:
- The wind power plant capacity is 100 MW.
- Power factor correction capacitors as well as plant-level volt/var devices and controls that may be present are modeled separately.
- For Type 3 and Type 4 WTGs, it is assumed that the plant is rated 110MVA, and that the converters are sized to provide 0.95 leading or lagging power factor at WTG terminals, at rated power and rated voltage.
- For Type 3 and Type 4 WTGs, it is assumed that the WTGs participate in plant-level close-loop voltage control at bus 5.
For a wind power plant with Type 1 WTGs, the function call would be as shown below. The call for a Type 2 WTG wind power plant would contain a call to the wt2e module in addition to the three model calls shown below. The parameters given are for illustration purposes only.
| wt1g 5 “Test” 0.6 “1 ” : #1 mva = 110. “Ls” 3.93 “Lp” 0.1773 “Ra” 0. “Tpo” 0.846 “Se1” 0.03 “Se2” 0.179 “Acc” 0.5 “Lpp” 0. “Ll” 0.1 “Tppo” 0. “ndelt” 10 “wdelt” 0.8
wt1t 5 “Test” 0.6 “1 ” : #1 mvacap = 100. “H” 5.30 “D” 0. “Htfrac” 0.92 “Freq1” 5. “Dshaft” 1. wt1p 5 “Test” 0.6 “1 ” : “Tpe” 0.1 “Kdroop” 0.015 “Kp” 0.1 “Ki” 66.667 “Pimax” 1. “Pimin” 0.25 “T1” 0.1 “T2” 0.1 “Kw” 1. |
For a wind power plant with Type 4 WTGs, the function call would as shown below. The call for a Type 3 WTG wind power plant would contain a call to the wtgt_a, wtga_a, wtgp_a, and wtgq_a modules, in addition to the three model calls shown below. Again, the parameters given are for illustration purposes only.
| regc_a 5 “Test” 0.6 “1 ” : #1 mva=111. “lvplsw” 1. “rrpwr” 10. “brkpt” 0.9 “zerox” 0.5 “lvpl1” 1.22 “vtmax” 1.2 “lvpnt1” 0.8 “lvpnt0” 0.4 “qlim” -1.3 “accel” 0.7 “tg” 0.02 “tfltr” 0.02 “iqrmax” 9999. “iqrmin” -999. “xe” 0.8
reec_a 5 “Test” 0.6 “1 ” : #1 “mvab” 0. “vdip” -99. “vup” 99.0 “trv” 0. “dbd1” -0.05 “dbd2” 0.05 “kqv” 0. “iqh1” 1.05 “iql1” -1.05 “vref0” 0. “iqfrz” 0.15 “thld” 0. “thld2” 0. “tp” 0.05 “qmax” 0.436 “qmin” -0.436 “vmax” 1.1 “vmin” 0.9 “kqp” 0. “kqi” 0.1 “kvp” 0. “kvi” 40. “vref1” 0. “tiq” 0.02 “dpmax” 99. “dpmin” -99. “pmax” 1. “pmin” 0. “imax” 1.82 “tpord” 0.02 “pfflag” 0. “vflag” 1. “qflag” 1. “pflag” 0. “pqflag” 0. “vq1” -1. “iq1” 1.45 “vq2” 2. “iq2” 1.45 “vq3” 0. “iq3” 0. “vq4” 0. “iq4” 0. “vp1” -1. “ip1” 1.1 “vp2” 2. “ip2” 1.1 “vp3” 0. “ip3” 0. “vp4” 0. “ip4” 0. repc_a 5 “Test” 0.6 “1 “: #1 “mvab” 0. “tfltr” 0.02 “kp” 18. “ki” 5. “tft” 0. “tfv” 0.05 “refflg” 1. “vfrz” 0. “rc” 0. “xc” 0. “kc” 0.02 “vcmpflg” 1. “emax” 0.1 “emin” -0.1 “dbd” 0. “qmax” 0.436 “qmin” -0.436 “kpg” 0.1 “kig” 0.05 “tp” 0.25 “fdbd1” 0. “fdbd2” 0. “femax” 99. “femin” -99. “pmax” 99. “pmin” -99. “tlag” 0.1 “ddn” 20. “dup” 0. “frqflg” 0. |
Scaling for the WPP size and reactive capability
To scale the dynamic model to the size of the plant, the generator MVA base parameter must be adjusted, taking into consideration the power output in the solved power flow case. Model parameters are expressed in per unit of the generator MVA base (mva parameter in the wt1g, wt2g and regc_a, modules in the examples above). The specification of MVA base is implementation-dependent. For example, in the Positive Sequence Load Flow (PSLF™) implementation, the MVA base specified for the generator module is used for the other modules, unless a positive MVA base for each module is entered through the parameter mvab. This allows for specification of different MVA base for the different modules, if desired. Similarly, for wind power plants using the Type 1 and Type 2 WTGs, the user can specify the size of the turbine independently from the size of the generator, by selecting the appropriate mvacap parameter.
For wind power plants with Type 3 and Type 4 WTGs, the reactive range can be adjusted with the qmin and qmax parameters in the REPC_A and REEC_A modules. Normally, the MVA base and reactive limits are the same as those used in power flow, taking into consideration that the capability is being specified for the equivalent generator, not the point of interconnection.
Volt/Var controls options
Type 1 and Type 2 WTGs do not participate in plant-level volt/var control. That capability, if present, would be enabled by reactive support equipment at the plant level (existing STATCOM or SVC models would be used). The generic models for Type 1 and Type 2 WTGs do not presently provide functionality to emulate coordinated operation of the generator with plant-level reactive support. Power factor correction capacitors that may be present at the WTG terminals should be modeled in power flow. The user should verify that the generator model power factor, after initialization, matches the power flow case.
Type 3 and Type 4 have the ability to participate in plant-level volt/var control, although this functionality is not always enabled. WTG reactive capability varies from manufacturer to manufacturer. WTG participation in plant-level volt/var control can be emulated by using the REPC_A module. The following control modes are available:
- Closed loop voltage regulation (V control) at a user-designated bus, with user-defined line drop compensation, droop and dead band.
- Closed loop reactive power regulation (Q control) at a user-designated branch, with user-defined dead band
Different function calls are required to specify the regulated bus or branch. In the examples provided above, the sample repc_a function call corresponds to a situation where the controlled bus is the generator terminals. In most cases, the controlled bus would be the point of interconnection. In the PSLF™ implementation, specification voltage control at a remote bus would be enabled with a function call as follows:
To regulate voltage at Bus 2, the function call would be as follows:
| repc_a 5 “Test” 0.6 “1 ” 2 “Test” 230. : #1 … |
To regulate the point defined by bus (mon_i) + |rc + jxc|Ibranch, the function call would be as follows:
| repc_a 5 “Test” 0.6 “1 ” ! ! ! ! ! 5 “WTG TERM” 0.6 4 “Test” 34.5 “1 ” : #1 … |
Type 3 and Type 4 WTGs also have the ability to respond dynamically to changes in the terminal voltage, in a time frame faster than the plant control. WTG-level reactive response can be emulated in the REEC_A module. The following control options are available:
- Constant power factor (PF), based on the equivalent generator power factor in the solved power flow case
- Constant reactive power, based either on the equivalent generator reactive power in the solved power flow case or from the plant controller
- Defined reactive power injection during a user-specified voltage-dip event
Various combinations of plant-level and inverter-level reactive control are possible by setting the appropriate parameters and switches. Table below shows a list of control options, and the modules and switches that would be involved. The entry “N/A” indicates that the state of the switch does not affect the indicated control mode.
| Functionality | Models Needed | PfFlag | Vflag | Qflag | RefFlag |
|---|---|---|---|---|---|
| Constant local PF control | REEC_A | 1 | N/A | 0 | N/A |
| Constant local Q control | REEC_A | 0 | N/A | 0 | N/A |
| Local V control | REEC_A | 0 | 0 | 1 | N/A |
| Local coordinated V/Q control | REEC_A | 0 | 1 | 1 | N/A |
| Plant level Q control | REPC_A | 0 | N/A | 0 | 0 |
| Plant level V control | REEC_A, REPC_A | 0 | N/A | 0 | 1 |
| Plant level Q control + local coordinated V/Q control | REEC_A, REPC_A | 0 | 1 | 1 | 0 |
| Plant level V control + local coordinated V/Q control | REEC_A, REPC_A | 0 | 1 | 1 | 1 |
Active power control options
Plant-level active power controls are not presently available for wind power plants with Type 1 and Type 2 WTGs. For Type 3 and Typ3 4 WTGs, the plant controller module allows a user to specify the active power control options listed below. Table below shows the active power control modes as well as the models and parameters involved.
- Constant active power, based on the equivalent generator output in the solved power flow case
- Governor droop response with different characteristics for over and under frequency conditions, based on frequency deviation at a user-designated bus.
Presently, REMTF recommends that plant level active power control be disabled for Type 3 WTGs, by setting the Freq_flag switch in the REPC_A module to 0. The reason is that the plant controller interaction with other modules (electrical, turbine, pitch, aerodynamic and torque control) has not been sufficiently validated.
| Functionality | Models Needed | Freq_flag | Ddn | Dup |
|---|---|---|---|---|
| No governor response | REEC_A | 0 | N/A | N/A |
| Governor response with down regulation, only | REEC_A, REPC_A | 1 | > 0 | 0 |
| Governor response with up and down regulation | REEC_A, REPC_A | 1 | > 0 | > 0 |
In situations where current limit of the equivalent inverter is reached, the user can specify whether active or reactive power takes precedence, by setting the Pqflag parameter in the REEC_A module.
Representation of Voltage and Frequency Protection
Frequency and voltage tolerance is required for transmission-connected wind power plants. Because they are simplified, the WECC generic models may not be suitable to fully assess compliance with voltage and frequency ride-through requirement. The same limitation applies to other positive-sequence models. Voltage ride-trough is engineered as part of the plant design, and requires far more sophisticated modeling detail than is possible to capture in a positive-sequence simulation environment. It is recommended that a standardized (existing) protection model with voltage and frequency thresholds and time delays can be used to indicate the minimum disturbance tolerance requirement that applies to the plant.
References
- ↑ WECC REMTF, WECC Wind Power Plant Dynamic Modeling Guide, April 20014, [Online]. Available: https://www.wecc.biz/Reliability/WECC%20Wind%20Plant%20Dynamic%20Modeling%20Guidelines.pdf [Accessed June 2015].
- ↑ WECC Second Generation Wind Turbine Models, January 23, 2014 https://www.wecc.biz/Reliability/WECC-Second-Generation-Wind-Turbine-Models-012314.pdf [Accessed June 2015]