
The WT1 WECC generic wind turbine stability model fort Type I WTGs was developed to simulate the performance of a wind turbine employing a conventional induction generator directly connected to the grid. WT1 is currently implemented in Siemens PTI – Power System Simulation for Engineering (PSSE)[1], GE – Positive Sequence Load Flow (PSLF)[2], and other simulation programs used in WECC.
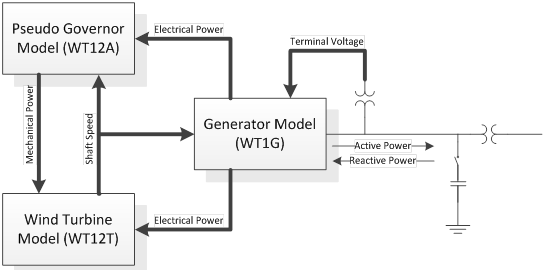
The model consists of three components: generator, wind turbine and pseudo governor. The generator is a standard induction generator excluding its inertial equation. The turbine is simply the inertial model of the wind turbine-generator; this model can be used to represent one or two masses. The inertia constant in the single mass representation, H, is equal to the sum of the inertia constants of the generator and the turbine (Hg + Ht). The stiffness constant, K, is a function of the first shaft torsional resonant frequency. This model is used for the Types 1, 2 and 3 generic WTG models. The mechanical power is generated by the pseudo governor model. This model was designed and developed following a thorough investigation of the aero-dynamic characteristics and pitch control of several vendor specific WTG models. The model uses two inputs: rotor speed deviation and generator electrical power. The output is the mechanical power on the rotor blade side. The pseudo governor model is used for the Types 1 and 2 generic WTG models. The turbine governor model represents an attempt to simplify the computation of the aero-torque.[3]
Contents
PSSE
The WT1 modeling package includes 3 main models as follows:
Control input parameters:
- Most of the parameters are given and unique for a specific turbine.
- Available in PSSE [1] and PSLF [2]
- The compensating capacitor is not dynamically modeled but it should be provided and initialized from load flow data.
- WIND PLANT SPECIFIC ADJUSTMENT:
- Plant Size (MVA and MWCAP)
- Dual mass versus single mass
Induction Generator Model (WT1G)
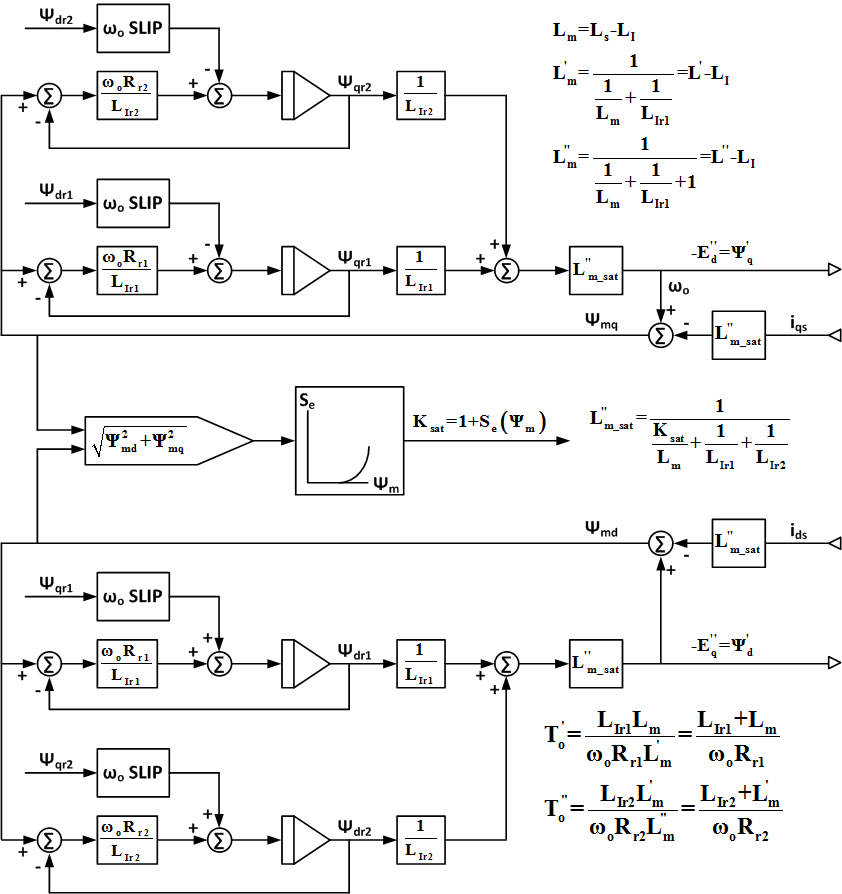
The generator model WT1G is based on the standard PSSE [1] model of the induction generator CIMTR3. This model takes into account the rotor flux dynamics and can be used for single cage or double cage machines. At initialization this model calculates the reactive power consumption of the machine Qact at given terminal voltage and MW-dispatch. It places a “hidden” shunt on the machine terminal bus, with the size equal to a difference between Qgen from the power flow and Qact.
| Input data for WT1G | ||
|---|---|---|
| CONs | Default Value | Description |
| J | 0.846 | T open circuit transient time constant, sec. ( >0) |
| J+1 | 0.0 | T’’, open circuit subtransient time constant,sec. (≥ 0); if T’’= 0, single cage |
| J+2 | 3.93 | X, synchronous reactance, pu |
| J+3 | 0.1773 | X’, transient reactance, pu |
| J+4 | 0.0 | X’’, subtransient reactance, pu (≥ 0); if X’’= 0, single cage |
| J+5 | 0.10 | Xl, leakage reactance, pu |
| J+6 | 1.0 | E1 |
| J+7 | 0.030 | S(E1) |
| J+8 | 1.20 | E2 |
| J+9 | 0.1790 | S(E2) |
| STATEs | Description | |
| K | Eq’, transient flux q-component | |
| K+1 | Ed’, transient flux d-component | |
| K+2 | Eq’’, subtransient flux q-component | |
| K+3 | Ed’’, subtransient flux d-component | |
| K+4 | Internal | |
| VARs | Description | |
| L | Admittance of initial condition MVAr difference | |
| L+1 | Machine Q | |
| L+2 | Telec | |
Turbine Model (WT12T)
The turbine WT12T model uses the two-mass representation of the wind turbine shaft drive train. It calculates the speed deviations of the rotor on the machine and on the blade sides. By setting the turbine inertia fraction Htfrac = 0 the model can be switched to a conventional single mass representation.
| Input data for WT12T | ||
|---|---|---|
| CONs | Default Value | Description |
| J | 5.30 | H, Total inertia constant, sec |
| J+1 | 0.0 | DAMP, Machine damping factor, pu P/pu speed |
| J+2 | 0.925 | Htfrac, Turbine inertia fraction (Hturb/H) |
| J+3 | 5.00 | Freq1, First shaft torsional resonant frequency, Hz |
| J+4 | 1.00 | Dshaft, Shaft damping factor (pu) |
| STATEs | Description | |
| K | Shaft twist angle, rad. | |
| K+1 | Turbine rotor speed deviation, pu | |
| K+2 | Generator speed deviation, pu | |
| K+3 | Generator rotor angle deviation, pu | |
| VARs | Description | |
| L | Paero on the rotor blade side, pu | |
| L+1 | Initial rotor slip | |
| L+2 | Initial internal angle | |
- Block Diagram (Dual Mass)
.png)
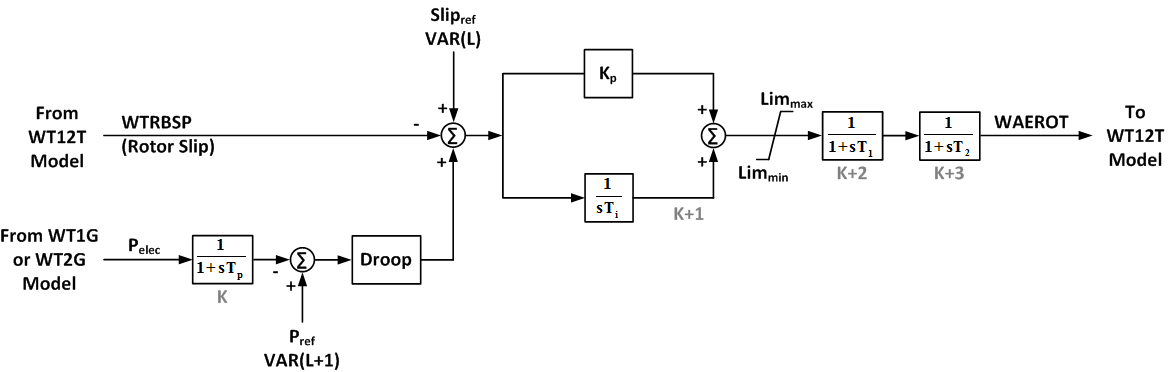
Pseudo Governor Model (WT12A)
The pseudo governor model WT12A is an attempt to simplify and generalize calculation of the aero-torque. This model was designed and developed after thorough investigation of aero-dynamic characteristics and pitch control of several vendor specific wind turbines. Finally the arrangement shown below was suggested. The model uses two inputs, one in terms of the blade rotor speed deviation and another in terms of the real power at the machine terminals. These two inputs combined together are processed by a PI controller with non-wind-up limits. The filtered output is the mechanical power on the rotor blade side which is used by the WT12T model.
| Input data for WT12A | ||
|---|---|---|
| CONs | Default Value | Description |
| J | 0.1500e-01 | Droop |
| J+1 | 0.10 | Kp, proportional gain, pu |
| J+2 | 0.1500e-01 | Ti, integrator time constant, sec. |
| J+3 | 0.10 | T1, output filter 1 time constant, sec. |
| J+4 | 0.10 | T2, output filter 2 time constant, sec. |
| J+5 | 0.10 | Tp, power filter time constant, sec. |
| J+6 | 1.0 | Limmax, maximum output limit |
| J+7 | 0.25 | Limmin, minimum output limit |
| STATEs | Description | |
| K | Power filter | |
| K+1 | PI integrator | |
| K+2 | Output filter 1 | |
| K+3 | Output filter 2 | |
| VARs | Description | |
| L | Reference | |
| L+1 | Power reference | |
- Block Diagram
PSLF
The WT1 modeling package includes 3 main models as follows:
- Generator model wt1g
- Wind turbine model wt1t
- Pseudo turbine-governor model wt1p.
Control input parameters:
- Most of the parameters are given and unique for a specific turbine.
- Available in PSSE [1] and PSLF [2]
- The compensating capacitor is not dynamically modeled but it should be provided and initialized from load flow data.
- WIND PLANT SPECIFIC ADJUSTMENT:
- Plant Size (MVA and MWCAP)
- Dual mass versus single mass
Induction Generator Model (wt1g)
The generator model wt1g is based on the standard PSLF [2] model for an induction generator (genind), but without the mechanical components, i.e., the generator inertia which is included in the turbine model (wt1t). The model is initialized to match the power generation specified in the power flow. The reactive requirements of the generator are met by the addition of a fictitious shunt at the machine terminals.
| Input data for wt1g | ||
|---|---|---|
| Variable | Default Value | Description |
| Ls | 3.93 | Synchronous reactance, p.u. |
| Lp | 0.1773 | Transient reactance, p.u. |
| Ra | 0.0 | Stator resistance, p.u. |
| Tpo | 0.846 | Transient rotor time constant, sec. |
| Se1 | 0.030 | Saturation factor at 1 p.u. flux |
| Se2 | 0.179 | Saturation factor at 1.2 p.u. flux |
| Acc | 0.5 | Acceleration factor for initialization |
| Lpp | 0.0 | Sub-transient reactance, p.u. |
| L1 | 0.10 | Stator leakage reactance, p.u. |
| Tppo | 0.0 | Sub-transient rotor time constant, sec. |
| ndelt | 10 | Time step subdivision factor. |
| wdelt | 0.80 | Speed threshold for subdividing time step, p.u. |
| Output data for wt1g | ||
| Record Level | Variable | Description |
| 1 | vt | Terminal voltage, p.u. |
| 1 | pg | Electrical power, MW |
| 1 | qg | Reactive power, MVAR |
| 2 | it | Terminal current, p.u. |
| 2 | te | Electrical torque, p.u. |
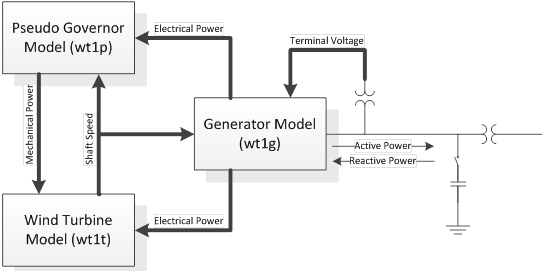
- Block Diagram
Turbine Model (wt1t)
The turbine wt1t model uses the two-mass representation of the wind turbine shaft drive train. It calculates the speed deviations of the rotor on the machine and on the blade sides. By setting the turbine inertia fraction Htfrac = 0 the model can be switched to a conventional single mass representation.
| Input data for wt1t | ||
|---|---|---|
| Variable | Default Value | Description |
| H | 5.30 | Total inertia constant, MW-sec/MVA |
| D | 0.0 | Damping factor, p.u. P / p.u. speed |
| Optional two-mass model: | ||
| Htfrac | 0.92 | Turbine inertia fraction (Ht / H) |
| Freq1 | 5.00 | First shaft torsional resonant frequency, Hz |
| Dshaft | 1.00 | Shaft damping factor, p.u. P / p.u. speed |
| Output data for wt1t | ||
| Record Level | Variable | Description |
| 1 | spd | Generator speed, p.u. (ω) |
| 2 | wtur | Turbine speed, p.u. in two-mass model (ωt) |
- Block Diagram (Single Mass)
.png)
Block Diagram (Dual Mass)
.png)
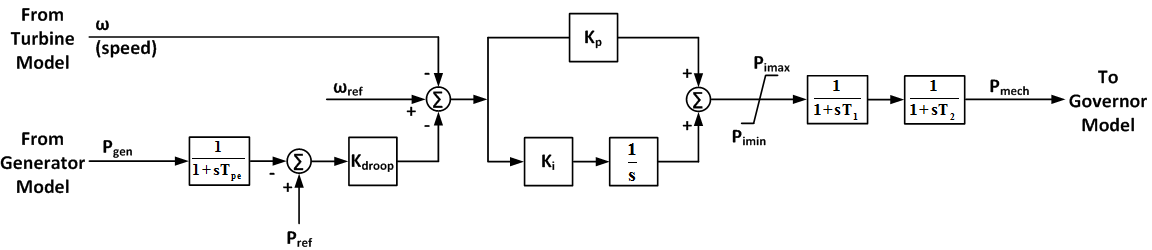
Pseudo Governor Model (wt1p)
The pseudo governor model wt1p is an attempt to simplify and generalize calculation of the aero-torque. This model was designed and developed after thorough investigation of aero-dynamic characteristics and pitch control of several vendor specific wind turbines. Finally the arrangement shown below was suggested. The model uses two inputs, one in terms of the blade rotor speed deviation and another in terms of the real power at the machine terminals. These two inputs combined together are processed by a PI controller with non-wind-up limits. The filtered output is the mechanical power on the rotor blade side which is used by the wt1t model.
| Input data for wt1p | ||
|---|---|---|
| Variable | Default Value | Description |
| Tpe | 0.10 | Time constant, sec. |
| Kdroop | 0.015 | Droop gain |
| Kp | 0.10 | PI proportional gain |
| Ki | 66.667 | PI integral gain |
| Pimax | 1.00 | PI output maximum limit, p.u. |
| Pimin | 0.25 | PI output minimum limit, p.u. |
| T1 | 0.10 | Time constant, sec. |
| T2 | 0.10 | Time constant, sec. |
| Output data for wt1p | ||
| Record Level | Variable | Description |
| 1 | pm | Mechanical power, MW (Pmech) |
- Block Diagram
References
- ↑ 1.0 1.1 1.2 1.3 Siemens Energy, Inc., PSSE Wind Model Library, Schenectady, NY, 2009.
- ↑ 2.0 2.1 2.2 2.3 GE Energy, PSLF Version 17.0_07 User’s Manual, Schenectady, NY, 2010.
- ↑ Working Group Joint Report – WECC Working Group on Dynamic Performance of Wind Power Generation & IEEE Working Group on Dynamic Performance of Wind Power Generation of the IEEE PES Power Stability Controls Subcommittee of the IEEE PES Power System Dynamic Performance Committee, “Description and Technical Specifications for Generic WTG Models – A Status Report.”